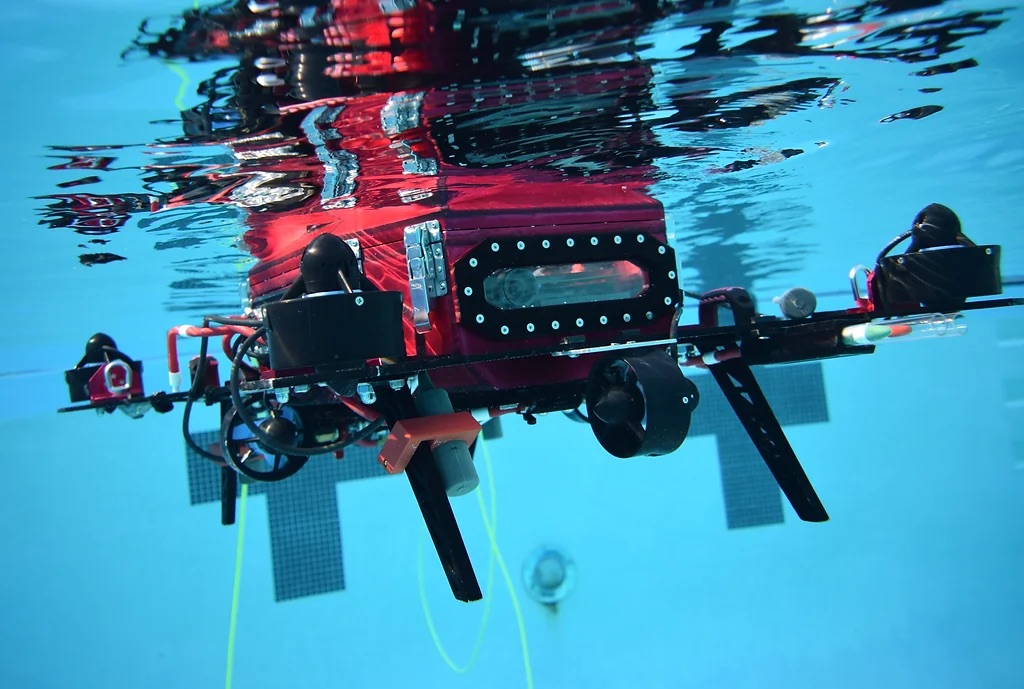
Robot Submarine Perseverance
Perseverance is an Underwater Autonomous Vehicle I designed and programmed with the Mechatronics club to compete in the International RoboSub Competition where it navigated an obstacle course while performing tasks autonomously. To earn points, it had to pass though the start gate, recognize and bump the correct buoys, drop a marker on the correct bin, shoot a torpedo through the correct target, and navigate to a pinger.